
Degrees of freedom
13DOF

Payload
250g
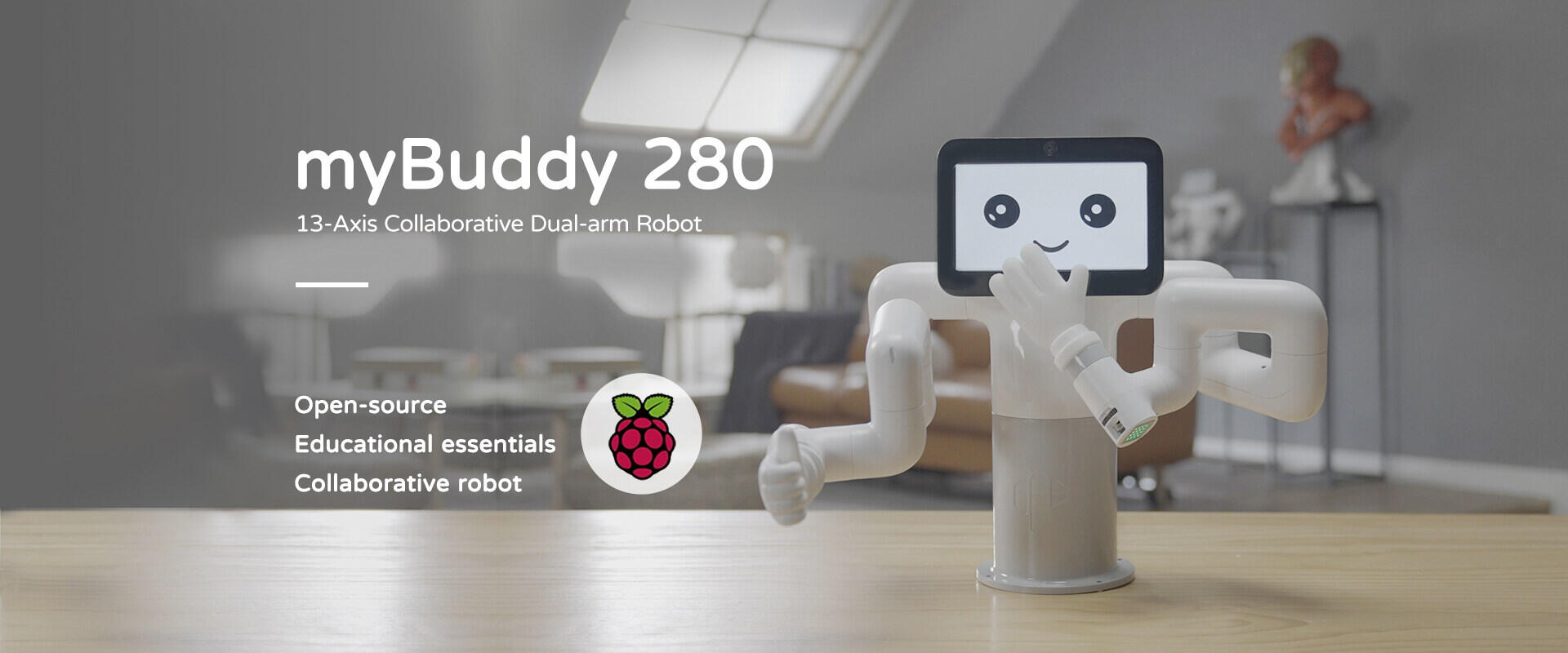
THE MOST COST-EFFECTIVE DUAL-ARM ROBOT
myBuddy is 1st dual-arm robot product of Elephant Robotics powered by Raspberry Pi, belonging to Service robot - A Dual-arm 13-axis Humanoid Collaborative Robot. The working radius of a single arm of myBuddy is 280mm, and the maximum payload is 250g. It owns a 7-inch interactive display screen and two 2-million-pixel HD camera, and provides the 3.3V I/O ports and Lego ports. myBuddy can work with multiple accessories such as suction pump,grippers,etc.It can meet the needs of different applications.
OPEN-SOURCE RESEARCH EDUCATION ROBOT
The whole machine motion control drive library of myBuddy is open, more than 100 control interfaces such as joint angel control,coordinate control,etc. Therefore, users can realize robot motion path planning algorithm research, dual-arm interference avoidance algorithm research, robot vision learning and other artificial intelligence applications development. myBuddy effectively helps developers and students to improve their personal scientific research ability.
Previous
Next

Visual Development environment
It can realize the learning and teaching of artificial intelligence grasping. Standard artificial intelligence camera interface. The 45-degree camera below supports area location positioning, object and QR code recognition. Another camera Can achieve the face & body recognition.
Creative Journey for Robot players
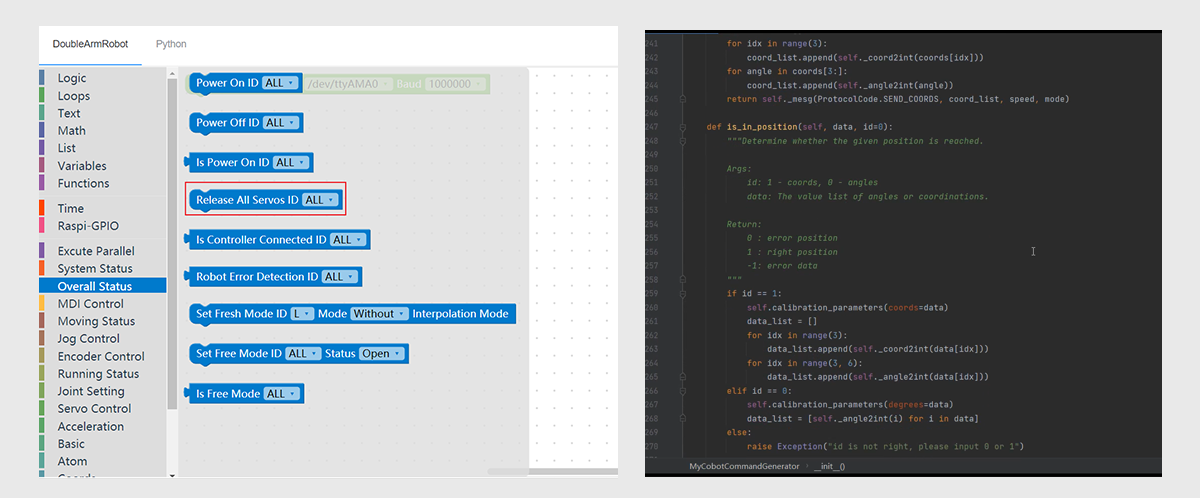
Open bottom control interface. The potential value, angles, coordinates, running speeds and other interfaces can be controlled freely. It can achieve the application research of dual-arm robots, motion path planning, development of action and visual recognition. A variety of interfaces can meet the multiple applications for the comercial use and educational purpose.


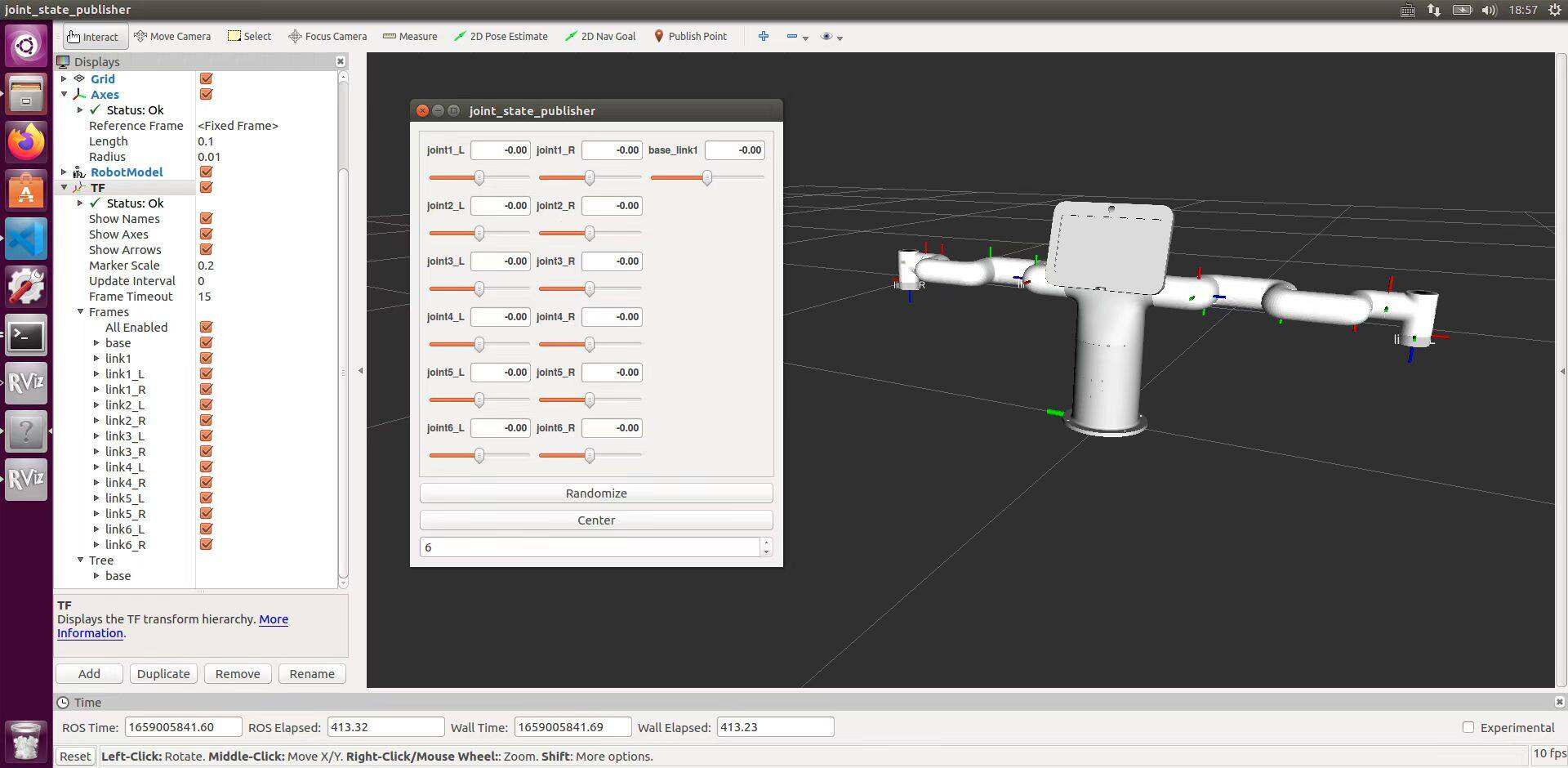
ROS Learning application
The ROS development environment built-in the robot system, it provides a variety of cases in the RVIZ and MOVEIT, such as mobile following, slider control, path planning and other advanced applications. The robot URDF configuration documents are open, so users can make secondary modification development.
Parameters
280mm working radius, up to 250g payload, 0.5MMRepeatability, to help you achieve your scene exploration needs.

Raspberry PI

ROS

Practical Teaching

Drag & Teach
Dual 4K video
Linux

USB3.0

cameras
Wireless control
Python

C++

MYBLOCKLY
Excellent Configuration
24V industrialized electrical interface, to complete your industrial scene development needs, key interaction, screen display, PLC interface, allowing you to quickly and safely build robotic arm application exploration scenarios.

OPEN-SOURCE INTERFACES
Based on different kinds of applications, open-source to its interfaces and enables to achieve objects recognition, facial recognition, image recognition etc.
Programming Languages
Support Python, C++, Arduino, C#, JS, etc.
Platforms
Support Android, Windows, Mac OSX and Linux.
Connecting
Methods
USB
wifi
Bluetooth
myBuddy Online Tutorials and Gitbook
Secondary Developments
Easily learn to program myBuddy in your style and ready to start your robotics journey.
myBlockly
Block-based , accessible official tutorials, help you learn it quickly.

Python demo
Built in dozens of application cases, fast landing, easy to use
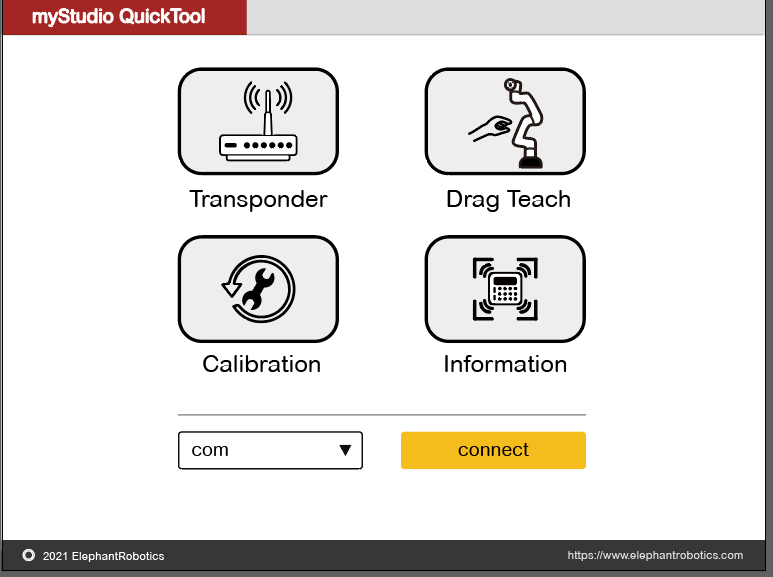
myStudio QuickTool
Quick teach and play myBuddy with TouchScreen
ROS Supporting
Developing in ROS - the world's mainstream robot communication framework, you can control myPalletizer and conduct algorithm verificationin under a virtual environment, which reduces the requirements for the experimental environment and improves the experimental efficiency.
myBuddy 280 Pi Unboxing
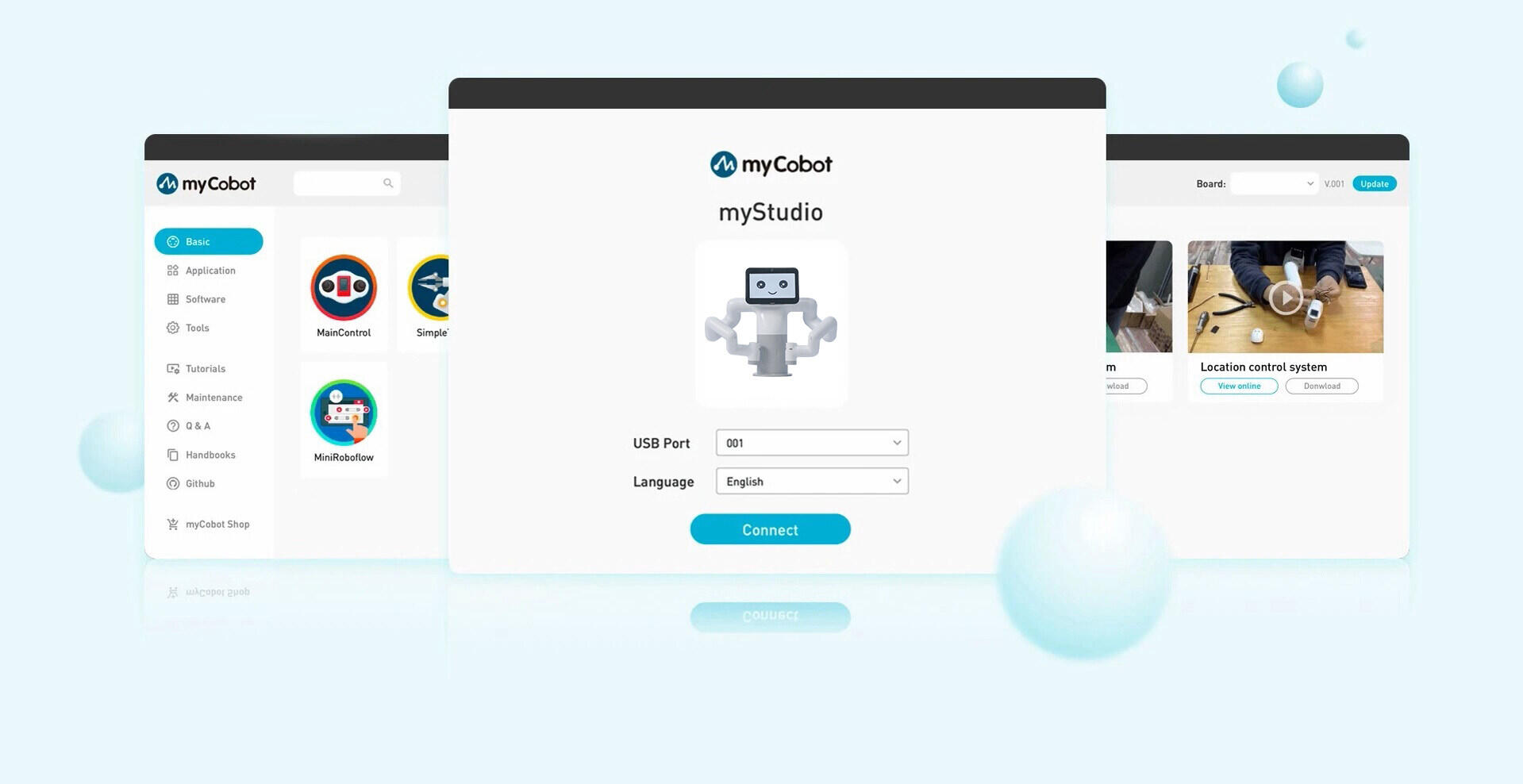
myStudio
myStudio is a one-stop platform for myBuddy.
The main functions of myStudio are: 1) Update the firmware; 2) Provide video tutorials on how to use the robot; 3) Provide maintenance and repair information (such as video tutorials, Q&A, etc.